
Initial Value Problems are solved using the Laplace Transform Method, as mentioned earlier, the Laplace transform method is very convenient way of solving ordinary differential equations in general and those with constant coefficients in particular. The advantage of this method is that it replaces differential equations (in variable t) by an algebraic equation (in variable s), which is much easier to solve. After having solved the latter by algebraic rules, the inverse Laplace transform enables us to obtain the solution of the given differential equation in terms of the original variable t.
Initial value problems are solved using the Laplace transform method, where in the initial conditions are automatically included. This contrasts with the usual classical approach in which the general solution of a differential equation comprises the complementary function and the particular integral, where in the initial conditions are used to determine the values of the constants of integration associated with the complementary function.
Example 10.1
Solve 
Solution
We take Laplace transforms of both sides of the given differential equation. Thus we obtain,

We use the formulae: 
Therefore, the above equation becomes,
![[s^2Y(s)-sy(0)-y^{\prime }(0)]+4Y(s)=16\left(\frac{1}{s^2}\right).](https://mathematicsglobe.com/wp-content/ql-cache/quicklatex.com-76177d871dc934b24293a95329bdfc67_l3.png "Rendered by QuickLaTeX.com")
Thus using the given initial conditions we obtain,
![[s^2Y(s)-3s+6]+4Y(s)=\frac{16}{s^2},](https://mathematicsglobe.com/wp-content/ql-cache/quicklatex.com-37a157cdb8411dfd9330044654178516_l3.png "Rendered by QuickLaTeX.com")
i.e.,

or,



Therefore, by taking the inverse Laplace transform of both sides we obtain,

But we know that,

Therefore, the solution of the given differential equation is,

Example 10.2
Solve 
Solution
Taking Laplace transform of both sides the given equation can be written as,

or,
![\ \ \ \ [s^2Y(s)-sy(0)-y^{\prime }(0)]+Y(s)=\frac{16s}{(s2+1)}.](https://mathematicsglobe.com/wp-content/ql-cache/quicklatex.com-f6d1ba48be41dbcd18097db47667a88b_l3.png "Rendered by QuickLaTeX.com")
By using the initial conditions it becomes,

Thus,

Taking inverse Laplace transform of both sides we get,

But we know that,

Thus we get the solution as,

Example 10.3
Solve, 
Solution
Taking Laplace transform of both sides of the given equation we get,
![[s^2Y(s)-sy(0)-y^{\prime }(0)]+2\left\{sY(s)-y(0)\right\}+5Y(s)=0.](https://mathematicsglobe.com/wp-content/ql-cache/quicklatex.com-13b9434b9a3fee8c846b42b6229f261d_l3.png "Rendered by QuickLaTeX.com")
Using the initial conditions this equation becomes,
![[s^2Y(s)-3s+7]+2sY(s)-6+5Y(s)=0.](https://mathematicsglobe.com/wp-content/ql-cache/quicklatex.com-2923decc2d74cd6140024fb2e46cc3e8_l3.png "Rendered by QuickLaTeX.com")
i.e.,

Thus,
![Y\left(s\right)=\frac{3s-1}{s^2+2s+5}=\frac{3\left(s+1\right)-4}{\left(s+1\right)^2+4}=3\left[\frac{\left(s+1\right)}{\left(s+1\right)^2+4}\right]-2\left[\frac{2}{\left(s+1\right)^2+4}\right].](https://mathematicsglobe.com/wp-content/ql-cache/quicklatex.com-0200e0b777530c539e22fe877dcb3bd9_l3.png "Rendered by QuickLaTeX.com")
But we know that,


Therefore, taking the inverse Laplace transform of the above equation we obtain the solution of the given differential equation as,
![y\left(t\right)=e^{-t}\left[3\cos 2t-2\sin 2t\right]](https://mathematicsglobe.com/wp-content/ql-cache/quicklatex.com-690643645f04144c1242d9fda461865a_l3.png "Rendered by QuickLaTeX.com")
Example 10.4
Solve 
Solution
Taking Laplace transform of both sides we can write the given equation as,
![\ \left[s^2Y\left(s\right)-sy\left(0\right)-y^{\prime }\left(0\right)\right]-3\left[sY\left(s\right)-y\left(0\right)\right]+2Y\left(s\right)=\frac{12}{s-4}](https://mathematicsglobe.com/wp-content/ql-cache/quicklatex.com-deb37299e2eb1fe4d29d381be95befd4_l3.png "Rendered by QuickLaTeX.com")
Using the initial conditions it becomes,
![\ \left[s^2Y\left(s\right)-s\right]-3\left[sY\left(s\right)-1\right]+2Y\left(s\right)=\frac{12}{s-4},](https://mathematicsglobe.com/wp-content/ql-cache/quicklatex.com-886b929e0d48dd4282a5484c638ec0c6_l3.png "Rendered by QuickLaTeX.com")
i.e.,
 .
.
Thus,

Now, we resolve the term on the right into partial fractions. We let,

or,

To find A we put s-1 = 0, i.e., s = 1 in the above equation. Thus we get, 18 = A (3), i.c.,
A = 6.
Similarly, to find B and C, we put s = 2, and s = 4 respectively in the above equation.
Accordingly we obtain, B =-7, and C = 2. Thus we get,

Taking the inverse Laplace transform of both sides we get,

Therefore,
 .
.
Example 10.5
Solve 
Solution
Taking Laplace transform of both sides of the given equation we obtain,
![\left[s^2Y\left(s\right)-sy\left(0\right)-y^{\prime }\left(0\right)\right]+2\left[sY\left(s\right)-y\left(0\right)\right]+Y\left(s\right)=\frac{1}{s}](https://mathematicsglobe.com/wp-content/ql-cache/quicklatex.com-89cd5d8cdef5a6f37217891416a7754c_l3.png "Rendered by QuickLaTeX.com")
Using the initial conditions this equation becomes,
![\left[s^2Y\left(s\right)-2s+2\right]+2\left[sY\left(s\right)-2\right]+Y\left(s\right)=\frac{1}{s}](https://mathematicsglobe.com/wp-content/ql-cache/quicklatex.com-f39ec6535057670f3db02eaec07d4a8e_l3.png "Rendered by QuickLaTeX.com")
or,

or,

Resolving the right hand side expression into partial fractions we obtain,

Taking the inverse Laplace transforms of both sides we get the solution of the given
differential equation as,

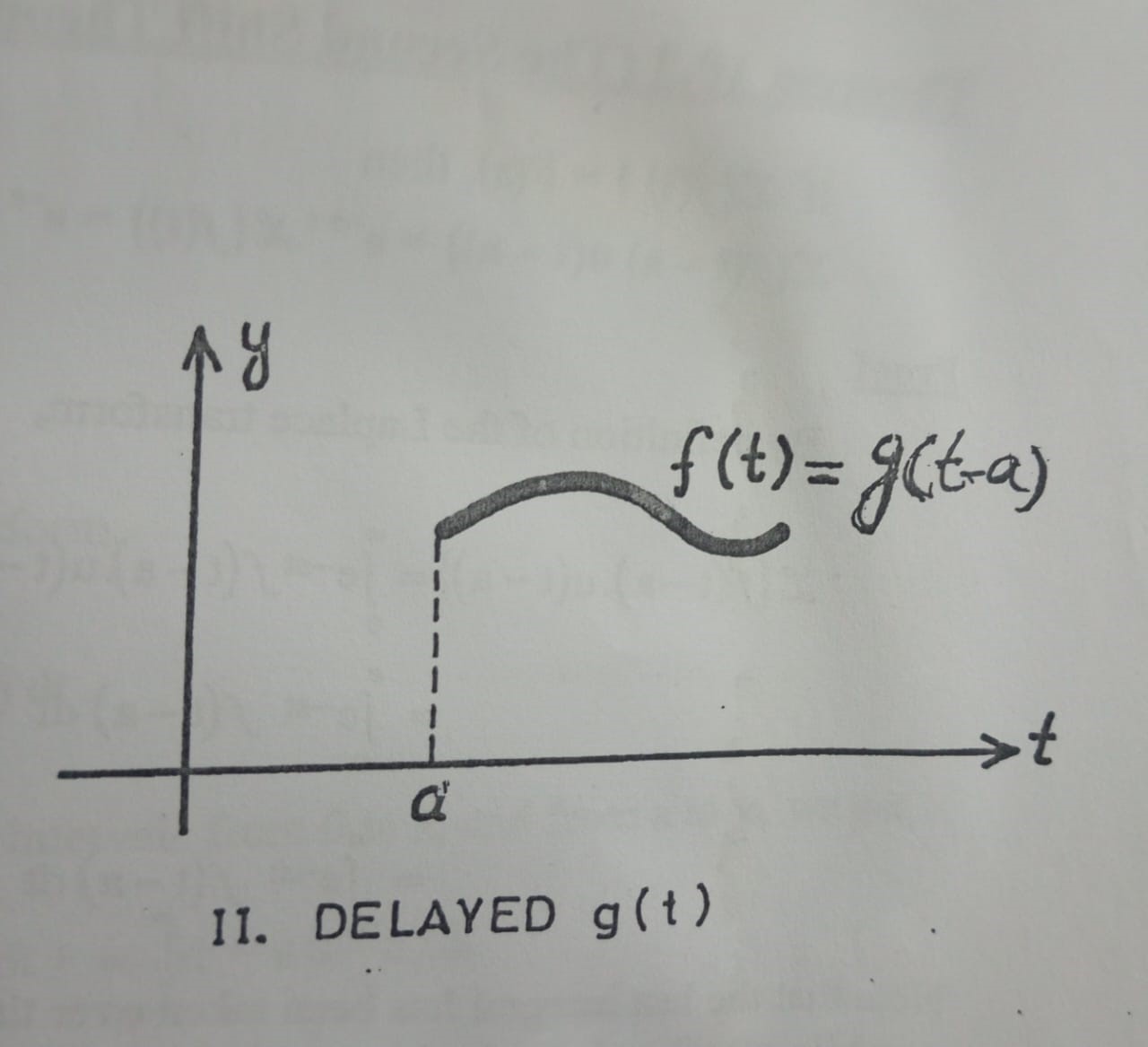
The Delayed Function
It is often required to translate or shift a given function g(t) to the right by ‘a‘ units and then replace the function by zero to the left of ‘a‘. For instance, if we translate a function g(t), shown in Fig 1 (i), to the right by ‘a‘ units and then replace the function by zero to the left of ‘a‘, the graph of the new function f(t), or delayed g(t) would look like the graph in Fig 1(ii). Mathematically, we could represent such a delayed function g(t) as,

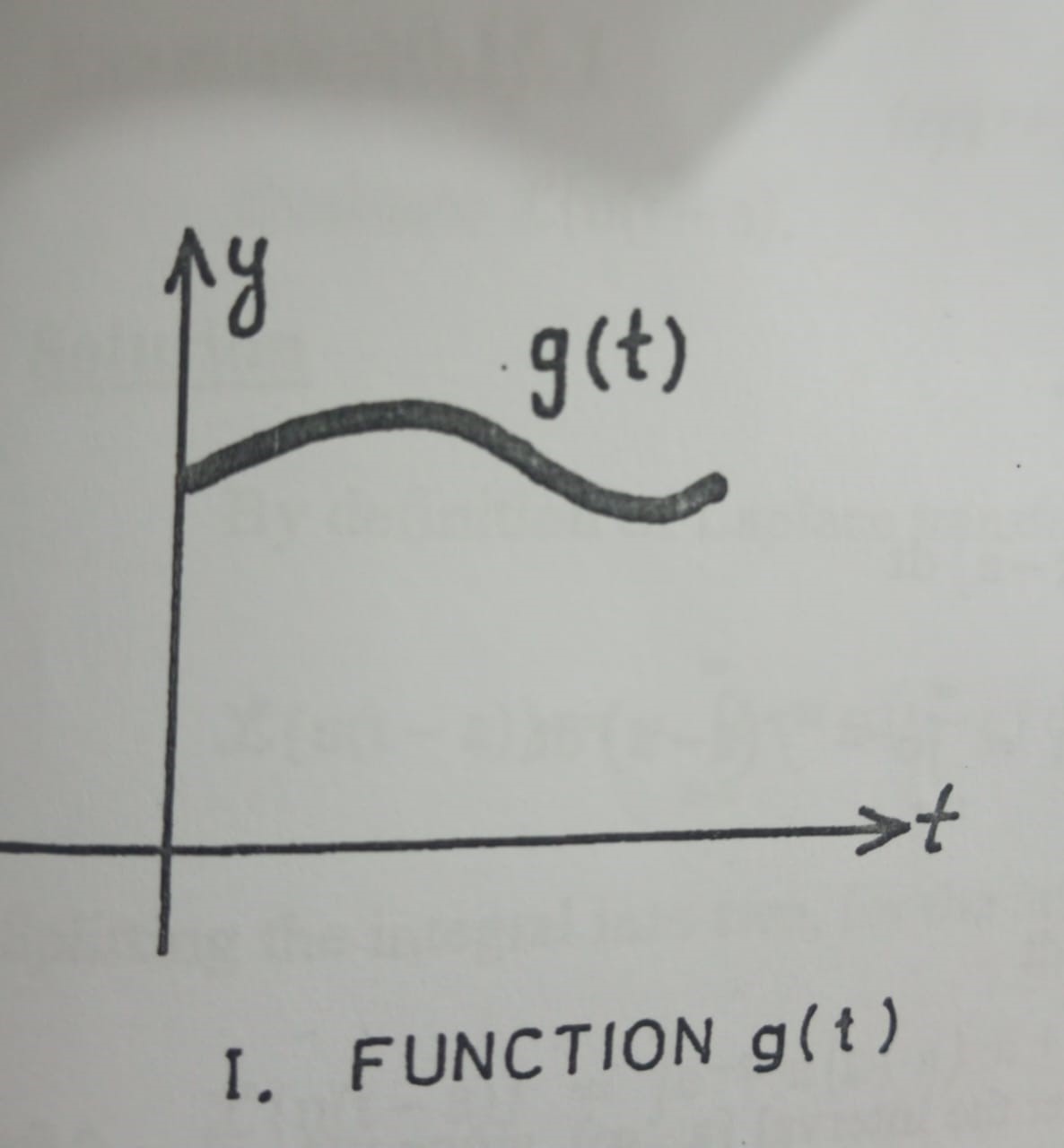
Fig 1(i)
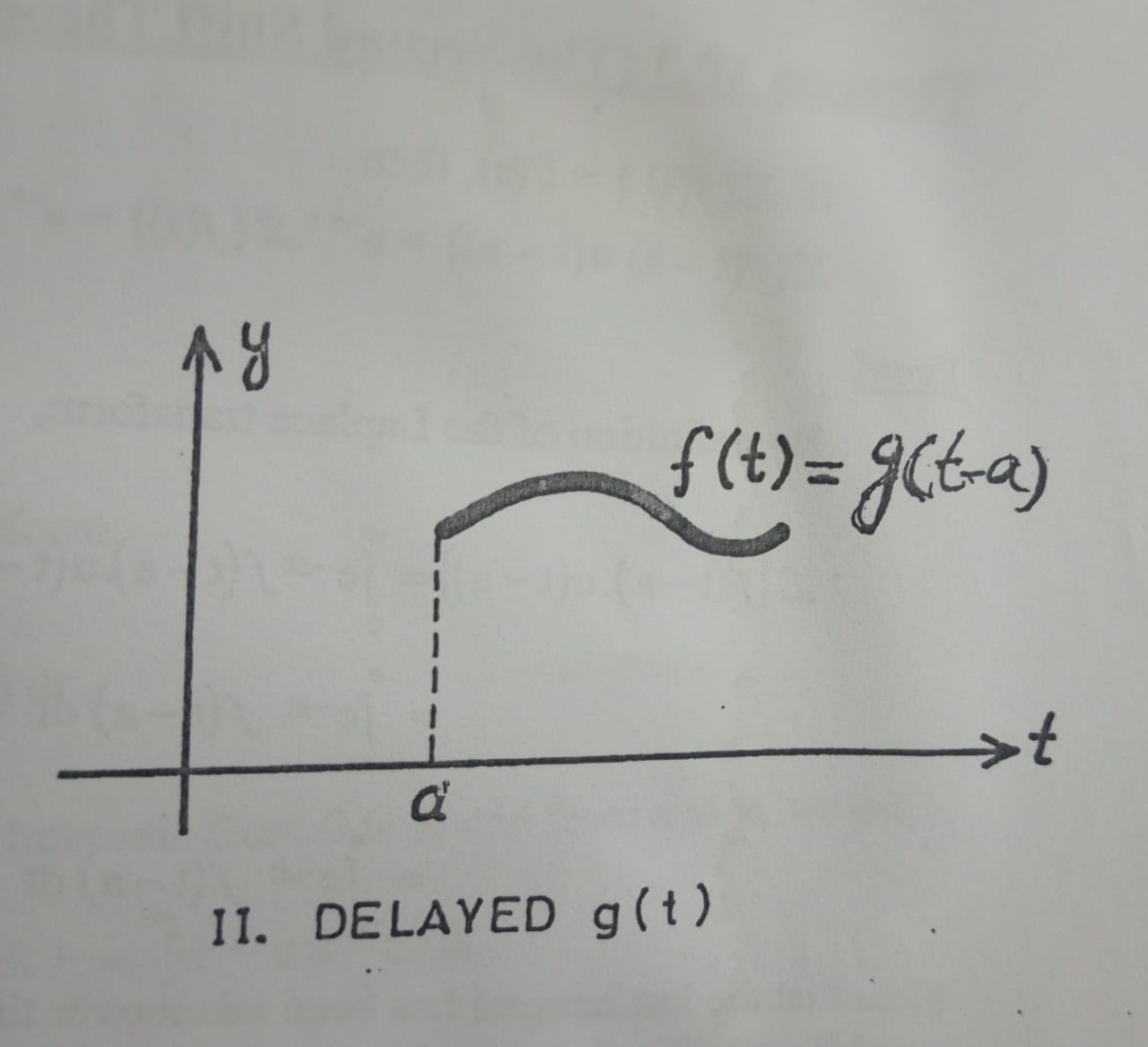
Fig 1(ii)
Example 10.1 (Representing Delayed Function)
Represent mathematically the delayed function obtained when the graph of g(t) =t² is translated 1 unit to the right and then truncated to the left of 1.
Solution
If we translate the given function g(t) to the right by 1 unit, then this function would become [latexg\left(t-1\right)=\left(t-1\right)^2[/latex]. Accordingly the delayed function would be,
0,
 (10.1)
(10.1)
Hence, using the formula for piece-wise defined function,the above function can be written in the compact form as,

![\ f\left(t\right)=0-0.u\left(t-1\right)+\left(t-1\right)^2.u\left(t-1\right)/latex] [latex]f\left(t\right)=\left(t-1\right)^2.u\left(t-1\right)](https://mathematicsglobe.com/wp-content/ql-cache/quicklatex.com-8691d8fe88dc85e544d40f2fc5999102_l3.png "Rendered by QuickLaTeX.com") (10.2)
(10.2)
Laplace Transform of Delayed Functions
For many problems it is required to find the Laplace transform of the delayed function,  , we can find this transform directly from the definition of the Laplace transform, as enunciated in the following theorem.
, we can find this transform directly from the definition of the Laplace transform, as enunciated in the following theorem.
Theorem (The Second Shift Theorem; t-Shifting)
If  ,
,
then
 (10.3)
(10.3)
Proof
By definition of the Laplace transform,



Note that the last integral has been taken over the interval [a, ∞), since u(t-a) = 0 for t< a, while u(t-a) = 1 on the interval [a, ∞). On substituting v=t-a in the above integral we obtain,


i.e.,
 (10.4)
(10.4)
Conversely,
 (10.5)
(10.5)
NOTE:
The above theorem essentially says that,
(i) To find the Laplace transform of the delayed function  we need to take the transform of f(t) and then multiply the transform by
we need to take the transform of f(t) and then multiply the transform by 
(ii) To find the inverse transform of the function  , we need to suppress the factor and take the inverse transform of F(s), getting f(t); then replace t by (t-a), to get f(t-a), and then multiply by u(t-a).
, we need to suppress the factor and take the inverse transform of F(s), getting f(t); then replace t by (t-a), to get f(t-a), and then multiply by u(t-a).
Example 10.1 (Transform of Delayed Function)
Find the Laplace transform of the function 
Solution
To be able to apply Theorem, we need to write the given function in the form f(t-1).u(t-1). We see that, ; as such,
; as such,


Therefore, the given function can be written as:

Accordingly, using Theorem , we get the Laplace transform of ƒ (t) as,
![\mathcal{L}\left\{t^2.u\left(t-1\right)\right\}=\mathcal{L}\left\{\left[\left(t-1\right)^2+2\left(t-1\right)\right].u\left(t-1\right)\right\}](https://mathematicsglobe.com/wp-content/ql-cache/quicklatex.com-bf6d6d763022b80338c057da6cbcbd16_l3.png "Rendered by QuickLaTeX.com")
![\mathcal{L}\left\{\left[\left(t-1\right)^2+u\left(t-1\right)\right]+2\mathcal{L}\left\{\left(t-1\right).u\left(t-1\right)\right\}+\mathcal{L}\left\{u\left(t-1\right)\right\}\right\}](https://mathematicsglobe.com/wp-content/ql-cache/quicklatex.com-823ec8bb0db44264e9999d25537f171d_l3.png "Rendered by QuickLaTeX.com")

![=e^{-s}\left[\frac{2}{s^3}+\frac{2}{s^2}+\frac{1}{s}\right].](https://mathematicsglobe.com/wp-content/ql-cache/quicklatex.com-348acbe894226b147ec36b2cf2e2ec23_l3.png "Rendered by QuickLaTeX.com")
Example 10.2
Find the Laplace transform of

Solution
Using unit step function and the translated step function, the given piece-wise defined function can be written as,
![f\left(t\right)=\left[f_1\left(t\right)\left\{u\left(t\right)-u\left(t-\pi \right)\right\}+f_2\left(t\right).u\left(t-\pi \right)\right]+\left[f_2\left(t\right)\left\{-u\left(t-2\pi \right)-u\left(t-\pi \right)\right\}+f_3\left(t\right).u\left(t-2\pi \right)\right]](https://mathematicsglobe.com/wp-content/ql-cache/quicklatex.com-403d31e0d2432a881f8ca67dbe14bbaf_l3.png "Rendered by QuickLaTeX.com")
![\begin{array}{l}f\left(t\right)=\left[0-\sin t.u\left(t-\pi \right)\right]+\left[\sin t.u\left(t-2\pi \right)+0\right]\\ \ \ \ \ \ \ \ =-\sin t.u\left(t-\pi \right)+\sin t.u\left(t-2\pi \right)\\ \ \ \ \ \ \ \ =\sin \left(t-\pi \right).u\left(t-\pi \right)+\sin \left(t-2\pi \right).u\left(t-2\pi \right)\end{array}](https://mathematicsglobe.com/wp-content/ql-cache/quicklatex.com-fa3546c018766c84352f843b7c55e3fa_l3.png "Rendered by QuickLaTeX.com")
Thus, the Laplace transform of this function is given as,
